I make {safe, robust, intelligent} robotic hands.
In-Hand Manipulation using Soft Hands!
|
Harvard Microrobotics Lab (w/ Prof. Robert Wood)
|
The last few years, I have been working to understand how to design soft robotics hands with enough dexterity to perform in-hand manipulation. I am looking at all aspects of hand design including finger design (and relevant workspace), finger arrangement, and palm design. Working with an excellent Masters student, we kicked this work off in 2019, and since then I've worked with several stellar undergrads to triage and explore several aspects of hand design.
To facilitate design studies, we've also been developing performance metrics that are relevant for in-hand manipulation, but take softness into account. I've also been working with a fellow PhD student on a fast, accurate simulation platform for soft robots (SoMo) that we can use for design explorations as well as machine learning for control. To enable all of this work, I developed a smooth pneumatic pressure control system (Ctrl-P) capable of realtime, high-bandwidth control of up to 30 independent pressure signals. This system integrates seamlessly with our robot arm and perception systems via Robot Operating System (ROS). |
Grasping and Manipulation Using Soft Robotic Hands
|
Harvard Microrobotics Lab (w/ Prof. Robert Wood)


|
My recent research directions attempt to answer the following question:
How can we design soft hands with high dexterity using minimal added complexity? This has pushed me to begin studying grasping and in-hand manipulation at a more-basic level. My approach involves a semi-rigorous design process:
Using this process, we can explore how the fundamental design of soft fingers and other hand components affect the resulting grasping or manipulation performance. My recent work uses this design process to explore the problem of precision grasping. Drawing from traditional grasping literature, we developed an understanding of the desired shape and compliance of fingers at contact points that enable more-stable precision grasps. This suggests that for the best precision grasping, we need soft fingers designed with two separate bending segments. Read more about it in the publication in IJRR. |
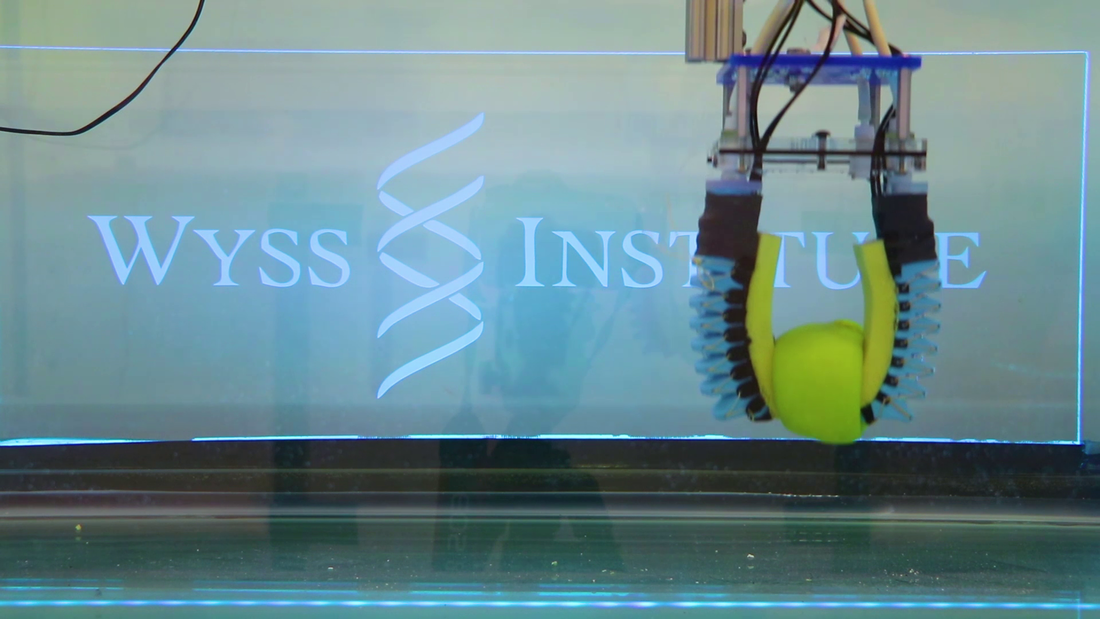
Soft Sensors for Underwater Soft Robotic Grippers
|
Harvard Microrobotics Lab (w/ Prof. Robert Wood)

|
Existing sampling equipment used on deep sea ROV's involves rigid, overpowered arms which are very difficult to operate, and put unnecessary amounts of stress on organisms during the collection process . "Squishy" soft robotic fingers can provide a gentle grasp to avoid applying too much force to organisms. The concept has been demonstrated by our lab several times on actual dives.
In this project, we outfitted our existing soft fingers with proprioception and contact senses. Building upon existing technology, I developed optical waveguide-based soft sensors that operate reliably in low-temperature, high-pressure salt water environments. We plan to implement these on our gripper, and move forward to higher level tasks such as optimizing sensor placement, sensor fusion, and various grasping tasks with machine-learning, and designing effective user-interface devices. |
